正文内容 评论(0)
仿生设计机械小强 蟑螂自行机器人

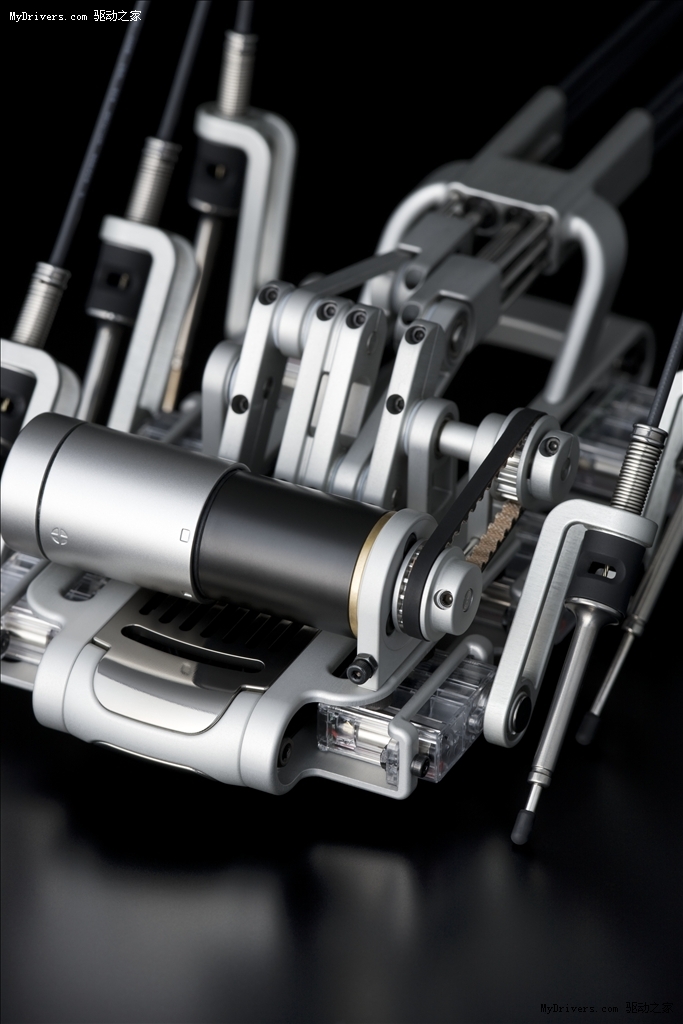
仿生设计一直是机器人研究领域中一项重要学科,比如这款名为Phasma的机器人就是利用了昆虫的行走方式,将其力学原理借鉴到其设计中。
Takram是一家专业的工程设计开发公司,其研发的Phasma基于斯坦福大学开发的iSprawl机器人进行了多方面的改进和优化。
Phasma共有六只机械足,每边都有三个,由发动机进行动力供给。这款机器人的行走原理最简单的描述就是,无路什么时间都会有三条腿在作支持,这样可以在快速移动中保证其处于一个稳定的状态,这是其仿生学原理最核心的部分。
目前这款机器人正在日本东京科学博物馆“仿生学机器人展”中进行展示,将持续至8月22日。
大家可以看一下其移动行走的视频展示,实在太像一只小强了。









本文收录在
#快讯
- 热门文章
- 换一波
- 好物推荐
- 换一波
- 关注我们
-

微博:快科技官方
快科技官方微博 -

今日头条:快科技
带来硬件软件、手机数码最快资讯! -

抖音:kkjcn
科技快讯、手机开箱、产品体验、应用推荐...